
Installing Foxglove Studio is now easier than ever

Gabriel Aguiar Noury
on 11 July 2022

Today, Foxglove announced the release of the Foxglove Studio snap. Foxglove Studio helps you experience the world as a robot does, providing a rich set of features to visualise data. By diversifying its distribution with a snap, Foxglove Studio is now available to millions of Linux users that can install this open-source tool with a single terminal command.
What is Foxglove Studio?
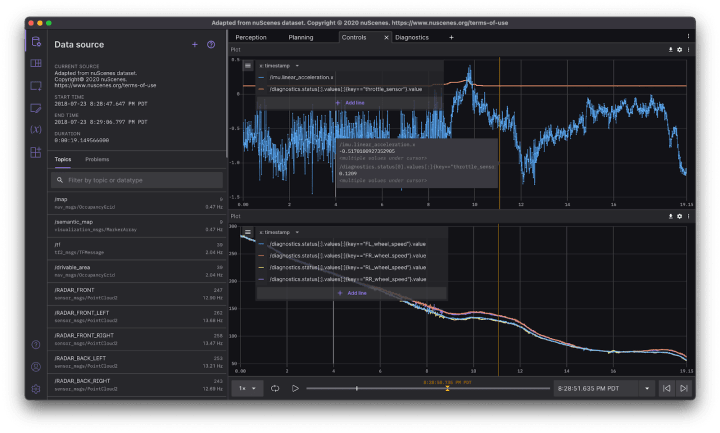
Foxglove Studio is an open source visualisation and debugging tool for your robotics data. It provides a rich suite of configurable tools to quickly and easily understand what your robot is doing, either live or from recordings.
While Foxglove Studio can be used with any framework, it works really well with ROS 1 and ROS 2. It can inspect your robotics data via a running ROS connection (i.e. a live robot, simulation, etc.) or from a recorded ROS bag file.
Foxglove Studio offers a suite of general-purpose tools for robotics data visualisation and debugging to serve users across different industries and with unique domain-specific needs.
Get it now from the Snap Store,
Installing Foxglove with snaps
To install the Foxglove Studio desktop app, you only need the following command:
$ sudo snap install foxglove-studioThat’s it. You are ready to go. To launch the app, you can either look it up in your application launcher or just run:
$ foxglove-studio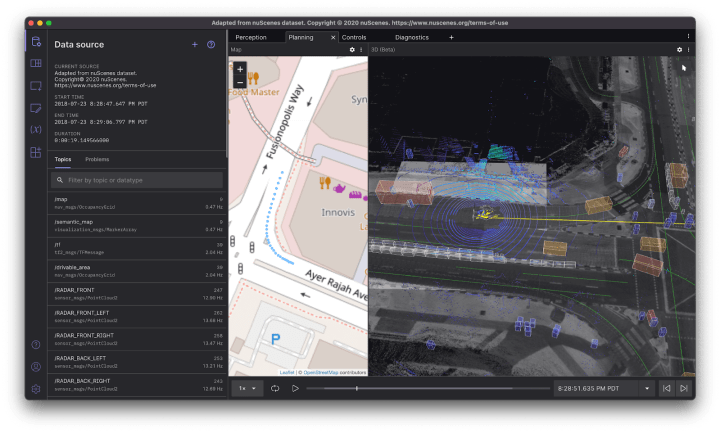
Why Foxglove is using snaps
Snaps bring several benefits for developers and users alike. When deploying your robotics applications as a snap, you use a production-grade packaging solution and its worldwide-used management infrastructure. Snaps allow developers to easily update bug fixes and manage new releases.
If you want to try snaps for your robotics applications, check out our tutorials to get started.
To learn more about Foxglove Studio, check out its documentation and the Foxglove blog.
Talk to us today
Interested in running Ubuntu in your organisation?
Newsletter signup
Are you building a robot on top of Ubuntu and looking for a partner? Talk to us!

Related posts
Extending ROS Noetic Support with ESM-Enabled Content Snaps
Canonical has now extended its ESM (Expanded Security Maintenance) for ROS coverage to ROS Noetic content-sharing snaps. With ESM for ROS now available in...
Discover your fully open source robotics observability at ROSCon 2025
Another year, another ROSCon! This year we’re heading to Singapore, and Canonical is once again thrilled to sponsor this important community event. Just like...
Canonical is now a platinum member in the Open Source Robotics Alliance
Ubuntu is the home of ROS. The very first ROS distribution, Box Turtle, launched on Ubuntu 8.04 LTS, Hardy Heron, and since then, Ubuntu and ROS have grown...